
{kind=link}
[ad_1]
Tiny drones are superb candidates for absolutely autonomous jobs which can be too harmful or time-consuming for people. A generally shared dream by engineers and hearth & rescue companies, can be to have swarms of such drones assist in search-and-rescue situations [1], as an example to localize gasoline leaks with out endangering human lives. Tiny drones are perfect for such duties, since they’re sufficiently small to navigate in slender areas, secure, agile, and really cheap. Nonetheless, their small footprint additionally makes the design of an autonomous swarm extraordinarily difficult, each from a software program and {hardware} perspective.
From a software program perspective, it’s actually difficult to provide you with an algorithm able to autonomous and collaborative navigation inside such tight useful resource constraints. State-of-the-art options like Simultaneous Localization and Mapping (SLAM) require an excessive amount of reminiscence and processing energy. A promising line of labor is to make use of bug algorithms [2], which will be applied as computationally environment friendly finite state machines (FSMs), and may navigate round obstacles with out requiring a map.
A draw back of utilizing FSMs is that the ensuing conduct will be very delicate to their hyperparameters, and due to this fact could not generalize exterior of the examined environments. That is very true for the issue of gasoline supply localization (GSL), as wind circumstances and impediment configurations drastically change the issue. On this article, we present how we tackled the advanced downside of swarm GSL in cluttered environments by utilizing a easy bug algorithm with advanced parameters, after which examined it onboard a totally autonomous swarm of tiny drones. We’ll give attention to the issues that have been encountered alongside the way in which, and the design decisions we made in consequence. On the finish of this put up, we can even add a brief dialogue about the way forward for tiny drones.
Why gasoline supply localization?
Total we’re inquisitive about discovering novel methods to allow autonomy on constrained units, like tiny drones. Two years in the past, we confirmed {that a} swarm of tiny drones was capable of discover unknown, cluttered environments and are available again to the bottom station. Since then, we have now been engaged on an much more advanced process: utilizing such a swarm for Gasoline Supply Localization (GSL).
There was a whole lot of analysis focussing on autonomous GSL in robotics, because it is a crucial however very onerous downside [3]. The issue of the duty comes from the complexity of how odor can unfold in an atmosphere. In an empty room with out wind, a gasoline will slowly diffuse from the supply. This permits a robotic to seek out the supply by merely transferring within the course that makes the gasoline focus go up, similar to small micro organism like E. Coli do to seek out vitamins. Nonetheless, if the atmosphere turns into bigger with many obstacles and partitions, and wind comes into play, the spreading of gasoline is way much less common. Giant components of the atmosphere could haven’t any gasoline or wind in any respect, whereas on the identical time there could also be pockets of gasoline away from the supply. Furthermore, chemical sensors for robots are a lot much less succesful than the smelling organs of animals. Out there chemical sensors for robots are usually much less delicate, noisier, and far slower.
Resulting from these difficulties, most work within the GSL area has targeted on a single robotic that has to discover a gasoline supply in environments which can be comparatively small and with out obstacles. Comparatively just lately, there have been research through which teams of robots clear up this process in a collaborative style, for instance with Particle Swarm Optimization (PSO). PSO was first invented as a strategy to mannequin the social conduct of foraging birds, through which the birds talk with one another how good the meals at their location is. The birds then observe a course that’s decided each by their very own observations and the very best noticed location of the swarm. PSO turned out to be a fantastic optimization algorithm for a lot of completely different real-world issues. Due to the completely different particles within the swarm, it will possibly escape native optima. Within the case of GSL, PSO permits a swarm of robots to collaboratively search a gasoline supply, whereas ignoring pockets of gasoline away from the gasoline supply. Till now this idea has been proven in simulation [4] and on massive out of doors drones outfitted with LiDAR and GPS [5], however by no means earlier than on tiny drones in advanced, GPS-denied, indoor environments.
Required Infrastructure
In our venture, we introduce a brand new bug algorithm, Sniffy Bug, which makes use of PSO for gasoline supply localization. As a way to tune the FSM of Sniffy Bug, we used an evolutionary algorithm. Such a algorithm mimics the survival of the fittest in pure evolution, however now with “health” outlined as with the ability to localize a gasoline supply as effectively as potential. The evolution begins out with random controllers for the swarm of robots, evaluates them in simulation, and selects the fittest controllers for replica. Over the generations, the controllers turn out to be more and more good on the process. After evolution, the very best controller is transferred to the true robots within the swarm.
In fact, for this evolution to work nicely, we’d like simulation of how gasoline spreads in a posh, indoor atmosphere. Nonetheless, early within the venture, we realized that this may be a problem, as no end-to-end gasoline modeling pipeline existed but. You will need to have an easy-to-use pipeline that doesn’t require any aerodynamics area information, such that as many researchers as potential can generate environments to check their algorithms. It will additionally make it simpler to check contributions and to higher perceive through which circumstances sure algorithms work or don’t work. The GADEN ROS bundle [6] is a good open supply device for modelling gasoline distribution when you have got an atmosphere and move area, however for our goal, we would have liked a totally automated device that might generate a fantastic number of random environments on-demand with only a few parameters. Beneath is an outline of our simulation pipeline: AutoGDM.
AutoGDM, a totally automated gasoline dispersion modeling (GDM) simulation pipeline.
First, we use a procedural atmosphere generator proposed in [7] to generate random partitions and obstacles inside the atmosphere. Then, gasoline dispersion modeling (GDM) is completed by first modeling a 3D move area, i.e., the course and magnitude of wind velocity at each level in area. Subsequent, a gasoline supply location is chosen. Then, on the supply, gasoline filaments are launched within the move area and randomly expanded over time. This leads to a time-varying gasoline focus area. The 3D move area is closely impacted by one thing known as “boundary circumstances”: the circumstances on the partitions within the atmosphere that we feed into the computational fluid dynamics (CFD) solver. In our case, this implies for some partitions we inform the CFD to power a wind velocity of 0 m/s, whereas for others we could inform it to mannequin an inlet or an outlet of air, like an open window. Figuring out the boundary circumstances is completed mechanically by AutoGDM.
Since a tough requirement for us was that AutoGDM wanted to be free to make use of, we selected to make use of the open-source CFD device OpenFOAM. It’s used for cutting-edge aerodynamics analysis, and likewise the device steered by the authors of GADEN. With out AutoGDM, utilizing OpenFOAM isn’t trivial, as numerous parameters that require area experience should be chosen, leading to an advanced course of. GADEN was used to take the atmosphere definition (CAD information) and the move area from OpenFOAM to generate the gasoline focus area over time.
After we constructed this pipeline, we nonetheless wanted a robotic simulator. Since we weren’t planning on utilizing a digicam, our principal requirement was for the simulator to be environment friendly (ideally in 2D) in order that evolutions would take comparatively little time. We determined to make use of Swarmulator [8], a computationally environment friendly C++ robotic simulator designed for swarming and we plugged in our gasoline knowledge.
Algorithm Design
Roughly talking, we thought of two classes of algorithms for controlling the drones: 1) a neural community, and a couple of) an FSM that included PSO, with advanced parameters. We first advanced neural networks in simulation. One of many first experiments is proven under.
A single agent in simulation in search of a gasoline supply utilizing a tiny neural community.
Whereas it labored fairly nicely in easy environments with few obstacles, it appeared difficult to make this work in actual life with advanced obstacles and a number of brokers that must collaborate. Given the time constraints of the venture, we opted for evolving the FSM. This additionally facilitated crossing the fact hole (i.e., the distinction between simulation and real-world behaviour), because the simulated evolution may construct on fundamental behaviors that we developed and validated on the true platform, together with impediment avoidance with 4 tiny laser rangers, whereas speaking with and avoiding different drones. A further benefit of PSO with respect to the fact hole is that it solely wants gasoline focus and no gradient of the gasoline focus or wind course (which many algorithms in literature use). On an actual robotic at this scale, estimating the gasoline focus gradient or the course of a light-weight breeze is difficult if not unattainable.
{Hardware}
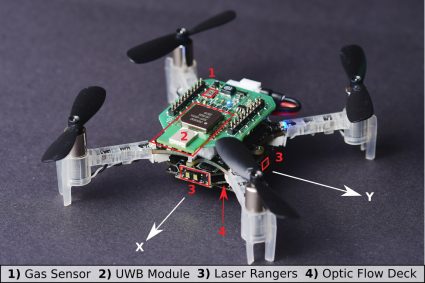
We deploy a 37.5g Bitcraze CrazyFlie nano drone that’s able to avoiding obstacles, executing velocity instructions, sensing gasoline, and estimating the opposite agent’s place in its personal body. For navigation we added a down-facing optic move sensor and 4 laser rangers, whereas for gasoline sensing we used a TGS8100 gasoline sensor that was used on a CrazyFlie earlier than in earlier work [9]. The sensor is light-weight and cheap, however precisely estimating gasoline concentrations will be troublesome due to its dimension. It tends to float and wishes time to get well after a spike in focus is noticed. One other factor we observed is that it’s potential to interrupt them, a crash can undoubtedly destroy the sensor.
To estimate the relative place between brokers, we use a Decawave Extremely-Wideband (UWB) module and talk states, as proposed in [10]. We additionally use the UWB module to speak gasoline data between brokers and collaboratively search the supply. The entire configuration is seen under.
A 37.5 g nano quadcopter, able to absolutely autonomous waypoint monitoring, impediment avoidance, relative localization, communication and gasoline sensing.
Analysis in Simulation
After we optimized the parameters of our mannequin utilizing Swarmulator and AutoGDM, and naturally attempting many various variations of our algorithm, we ended up with the ultimate Sniffy Bug algorithm. Beneath is a video that reveals advanced Sniffy Bug evaluated in six completely different environments.
The purple dots are an agent’s private goal waypoint, whereas the yellow dot is the best-known place for the swarm. Simulation reveals that Sniffy Bug is efficient at finding the gasoline supply in randomly generated environments. The drones efficiently collaborate by way of PSO.
Actual Flight Testing
After observing Sniffy Bug in simulation we have been optimistic, however uncertain about efficiency in actual life. First, impressed by earlier works, we dispersed alcohol by means of the air by putting liquid alcohol right into a can which was then dispersed utilizing a pc fan.
Dispersion of liquid alcohol in flight checks.
We examined Sniffy Bug in our flight enviornment of dimension 10 x 10 meters with massive obstacles that have been formed like partitions and orange poles. The picture under reveals 4 flight checks of Sniffy Bug in cluttered environments, flying absolutely autonomously, i.e., with out the assistance from any exterior infrastructure.
Time-lapse photos of real-world experiments in our flight enviornment. Sniffy was evaluated on 4 distinct environments, 10 x 10 meters in dimension, in search of an actual isopropyl alcohol supply. The trajectories of the nano quadcopters are clearly seen attributable to their blue lights.
Within the whole of 24 runs we executed, we in contrast Sniffy Bug with manually chosen and advanced parameters. The determine under reveals that the advanced parameters are extra environment friendly in finding the supply as in comparison with the guide parameters.
Most recorded gasoline studying by the swarm, for every time step for every run.
This doesn’t solely present that our system can efficiently find a gasoline supply in difficult environments, nevertheless it additionally demonstrates the usefulness of the simulation pipeline. The parameters that have been realized in simulation yield a high-performance mannequin, validating the atmosphere technology, randomization, and gasoline modeling components of our pipeline.
Conclusion and Dialogue
With this work, we consider we have now made an essential step in direction of swarms of gas-seeking drones. The proposed resolution has been proven to work in actual flight checks with obstacles, and with none exterior techniques to assist in localization or communication. We consider this system will be prolonged to bigger environments and even to three dimensions, since PSO is a strong, multi-dimensional heuristic search methodology. Furthermore, we hope that AutoGDM will assist the group to higher examine gasoline in search of algorithms, and to extra simply be taught parameters or fashions in simulation, and deploy them in the true world.
To enhance Sniffy Bug’s efficiency, including extra laser rangers will certainly assist. When working with solely 4 laser rangers you understand how little data they really present. If one of many rangers senses a low worth, it’s unclear if a slim pole or a large wall is detected, including inefficiency to the algorithm. Including extra laser rangers or utilizing different sensor modalities like imaginative and prescient will assist to keep away from additionally extra advanced obstacles than partitions and poles in a dependable method.
One other fascinating dialogue will be held on the {hardware} required for actual deployment. When working with 40 grams of most take-off weight, the sensors and actuators that may be chosen are restricted. For instance, the low-power and light-weight move deck works nice however fails in low-light situations or with smoke. Future work exploring novel sensors for extremely constrained nano robots may actually assist improve the Technological Readiness Stage (TRL) of those techniques.
Lastly, this has been a very enjoyable venture to work on for us and we will’t wait to listen to your ideas on Sniffy Bug!
References
[1] Carrillo-Zapata D, Milner E, Hird J, et al. Mutual Shaping in Swarm Robotics: Person Research in Fireplace and Rescue, Storage Group, and Bridge Inspection. Entrance Robotic AI. 2020;7:53. Revealed 2020 Apr 21. doi:10.3389/frobt.2020.00053
[2] Ok. N. McGuire, C. De Wagter, Ok. Tuyls, H. J. Kappen, and G. C. H. E.de Croon, “Minimal navigation resolution for a swarm of tiny flying robotsto discover an unknown atmosphere,”Science Robotics, vol. 4, no. 35,2019.
[3] Jing T, Meng Q-H, Ishida H. Current progress and development of robotic odor supply localization. IEEJ trans electr electron eng. 2021;16(7):938-953
[4] W. Jatmiko, Ok. Sekiyama and T. Fukuda, “A pso-based cell robotic for odor supply localization in dynamic advection-diffusion with obstacles atmosphere: concept, simulation and measurement,” in IEEE Computational Intelligence Journal, vol. 2, no. 2, pp. 37-51, Might 2007, doi: 10.1109/MCI.2007.353419.
[5] Steiner, JA, Bourne, JR, He, X, Cropek, DM, & Leang, KK. “Chemical-Supply Localization Utilizing a Swarm of Decentralized Unmanned Aerial Autos for City/Suburban Environments.” Proceedings of the ASME 2019 Dynamic Programs and Management Convention. Quantity 3, Park Metropolis, Utah, USA. October 8–11, 2019. V003T21A006. ASME. https://doi.org/10.1115/DSCC2019-9099
[6] Monroy, V. Hernandez-Bennetts, H. Fan, A. Lilienthal, andJ. Gonzalez-Jimenez, “Gaden: A 3D gasoline dispersion simulator for mobilerobot olfaction in sensible environments,”MDPI Sensors, vol. 17, no.7: 1479, pp. 1–16, 2017.
[7] Ok. McGuire, G. de Croon, and Ok. Tuyls, “A comparative examine of bug algorithms for robotic navigation,”Robotics and Autonomous Programs, vol.121, p. 103261, 2019.
[8] https://github.com/coppolam/swarmulator
[9] J. Burgues, V. Hern ́andez, A. J. Lilienthal, and S. Marco, “Smelling nano aerial automobile for gasoline supply localization and mapping, ”Sensors(Switzerland), vol. 19, no. 3, 2019.
[10] S. Li, M. Coppola, C. D. Wagter, and G. C. H. E. de Croon, “An autonomous swarm of micro flying robots with range-based relative localization,” Arxiv, 2020.
Hyperlinks
ArXiv: https://arxiv.org/abs/2107.05490
Video: https://www.youtube-nocookie.com/watch?v=hj_SBSpK5qg
Code: https://github.com/tudelft/sniffy-bug
Please attain out you probably have any questions or concepts, you’ll be able to attain us at: b.p.duisterhof@gmail.com or g.c.h.e.decroon@tudelft.nl
tags: bio-inspired, c-Analysis-Innovation, Flying, Swarming
Bart Duisterhof
is a pupil within the area of autonomous aerial robots
Guido de Croon
is Full Professor on the Micro Air Car lab of Delft College of Know-how within the Netherlands.
Guido de Croon
is Full Professor on the Micro Air Car lab of Delft College of Know-how within the Netherlands.
[ad_2]