
{kind=link}
[ad_1]
Overview of the on-sensor mapping. The system strikes round and because it does it builds a visible catalogue of what it observes. That is the map that’s later used to know if it has been there earlier than.Picture credit score: College of Bristol
Realizing the place you might be on a map is without doubt one of the most helpful items of data when navigating journeys. It means that you can plan the place to go subsequent and likewise tracks the place you’ve been earlier than. That is important for good units from robotic vacuum cleaners to supply drones to wearable sensors maintaining a tally of our well being.
However one necessary impediment is that techniques that must construct or use maps are very complicated and generally depend on exterior alerts like GPS that don’t work indoors, or require a substantial amount of power because of the giant variety of elements concerned.
Walterio Mayol-Cuevas, Professor in Robotics, Pc Imaginative and prescient and Cell Programs on the College of Bristol’s Division of Pc Science, led the group that has been growing this new know-how.
He mentioned: “We regularly take with no consideration issues like our spectacular spatial skills. Take bees or ants for instance. They’ve been proven to have the ability to use visible info to maneuver round and obtain extremely complicated navigation, all with out GPS or a lot power consumption.
“In nice half it’s because their visible techniques are extraordinarily environment friendly and well-tuned to creating and utilizing maps, and robots can’t compete there but.”
Nonetheless, a brand new breed of sensor-processor units that the group calls Pixel Processor Array (PPA), permit processing on-sensor. Which means that as photos are sensed, the system can resolve what info to maintain, what info to discard and solely use what it wants for the duty at hand.
An instance of such PPA system is the SCAMP structure that has been developed by the group’s colleagues on the College of Manchester by Piotr Dudek, Professor of Circuits and Programs from the College of Manchester and his group. This PPA has one small processor for each pixel which permits for massively parallel computation on the sensor itself.
The group on the College of Bristol has beforehand demonstrated how these new techniques can recognise objects at hundreds of frames per second however the brand new analysis reveals how a sensor-processor system could make maps and use them, all on the time of picture seize.
This work was a part of the MSc dissertation of Hector Castillo-Elizalde, who did his MSc in Robotics on the College of Bristol. He was co-supervised by Yanan Liu who can be doing his PhD on the identical matter and Dr Laurie Bose.
Hector Castillo-Elizalde and the group developed a mapping algorithm that runs all on-board the sensor-processor system.
The algorithm is deceptively easy: when a brand new picture arrives, the algorithm decides whether it is sufficiently totally different to what it has seen earlier than. Whether it is, it’s going to retailer a few of its information, if not it’s going to discard it.
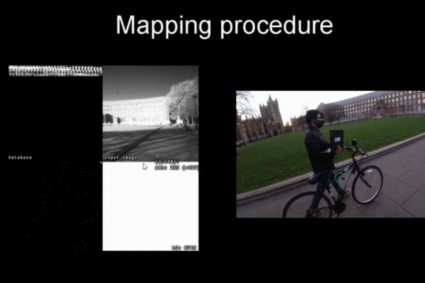
Proper: the system strikes world wide, Left: A brand new picture is seen and a choice is made so as to add it or to not the visible catalogue (prime left), that is the pictorial map that may then be used to localise the system later. Picture credit score: College of Bristol
Because the PPA system is moved round by for instance an individual or robotic, it’s going to acquire a visible catalogue of views. This catalogue can then be used to match any new picture when it’s within the mode of localisation.
Importantly, no photos exit of the PPA, solely the important thing information that signifies the place it’s with respect to the visible catalogue. This makes the system extra power environment friendly and likewise helps with privateness.
Throughout localisation the incoming picture is in comparison with the visible catalogue (Descriptor database) and if a match is discovered, the system will inform the place it’s (Predicted node, small white rectangle on the prime) relative to {the catalogue}. Be aware how the system is ready to match photos even when there are adjustments in illumination or objects like individuals transferring.
The group believes that this kind of synthetic visible techniques which are developed for visible processing, and never essentially to document photos, is a primary step in the direction of making extra environment friendly good techniques that may use visible info to know and transfer on the planet. Tiny, power environment friendly robots or good glasses doing helpful issues for the planet and for individuals will want spatial understanding, which is able to come from with the ability to make and use maps.
The analysis has been partially funded by the Engineering and Bodily Sciences Analysis Council (EPSRC), by a CONACYT scholarship to Hector Castillo-Elizalde and a CSC scholarship to Yanan Liu.
tags: c-Analysis-Innovation
College of Bristol
is without doubt one of the hottest and profitable universities within the UK.
[ad_2]