
{kind=link}
[ad_1]
Abstraction in programming has developed our use of computer systems from primary arithmetic operations to representing advanced real-world phenomena utilizing fashions. Extra particular to robotics, abstraction has moved us from low-level actuator management and primary sensing to reasoning about higher-level ideas behaviors, as I outline in my Anatomy of a Robotic System put up.
In autonomous methods, now we have seen a complete host of abstractions past “plain” programming for conduct modeling and execution. Some frequent ones chances are you’ll discover within the literature embrace teleo-reactive packages, Petri nets, finite-state machines (FSMs), and conduct bushes (BTs). In my expertise, FSMs and BTs are the 2 abstractions you see most frequently in the present day.
On this put up, I’ll introduce conduct bushes with all their terminology, distinction them with finite-state machines, share some examples and software program libraries, and as at all times depart you with some sources if you wish to study extra.
As we launched above, there are a number of abstractions to assist design advanced behaviors for an autonomous agent. Usually, these include a finite set of entities that map to specific behaviors or working modes inside our system, e.g., “transfer ahead”, “shut gripper”, “blink the warning lights”, “go to the charging station”. Every mannequin class has some algorithm that describe when an agent ought to execute every of those behaviors, and extra importantly how the agent ought to change between them.
Conduct bushes (BTs) are one such abstraction, which I’ll outline by the next traits:
Conduct bushes are bushes (duh): They begin at a root node and are designed to be traversed in a particular order till a terminal state is reached (success or failure).
Leaf nodes are executable behaviors: Every leaf will do one thing, whether or not it’s a easy examine or a posh motion, and can output a standing (success, failure, or operating). In different phrases, leaf nodes are the place you join a BT to the lower-level code in your particular software.
Inside nodes management tree traversal: The interior (non-leaf) nodes of the tree will settle for the ensuing standing of their youngsters and apply their very own guidelines to dictate which node ought to be expanded subsequent.
Conduct bushes truly started within the videogame business to outline behaviors for non-player characters (NPCs): Each Unreal Engine and Unity (two main forces on this area) have devoted instruments for authoring BTs. That is no shock; a giant benefit of BTs is that they’re simple to compose and modify, even at runtime. Nonetheless, this sacrifices the convenience of designing reactive behaviors (for instance, mode switches) in comparison with a number of the different abstractions, as you will notice later on this put up.
Since then, BTs have additionally made it into the robotics area as robots have grow to be more and more able to doing greater than easy repetitive duties. Simply the most effective useful resource right here is the textbook “Conduct Timber in Robotics and AI: An Introduction” by Michele Colledanchise and Petter Ögren. In actual fact, should you actually need to study the fabric it is best to cease studying this put up and go on to the e-book … however please stick round?
Conduct tree Editor in Unreal Engine. Supply: Unreal Engine documentation
Let’s dig into the terminology in conduct bushes. Whereas the language shouldn’t be commonplace throughout the literature and numerous software program libraries, I’ll largely comply with the definitions in Conduct Timber in Robotics and AI.
At a look, these are the sorts of nodes that make up conduct bushes and the way they’re represented graphically:
Overview of conduct tree nodes.
Conduct bushes execute in discrete replace steps often known as ticks. When a BT is ticked, normally at some specified charge, its youngster nodes recursively tick primarily based on how the tree is constructed. After a node ticks, it returns a standing to its mother or father, which might be Success, Failure, or Working.
Execution nodes, that are leaves of the BT, can both be Motion or Situation nodes. The one distinction is that situation nodes can solely return Success or Failure inside a single tick, whereas motion nodes can span a number of ticks and might return Working till they attain a terminal state. Usually, situation nodes symbolize easy checks (e.g., “is the gripper open?”) whereas motion nodes symbolize advanced actions (e.g., “open the door”).
Management nodes are inner nodes and outline find out how to traverse the BT given the standing of their youngsters. Importantly, youngsters of management nodes might be execution nodes or management nodes themselves. Sequence, Fallback, and Parallel nodes can have any variety of youngsters, however differ in how they course of stated youngsters. Decorator nodes essentially have one youngster, and modify its conduct with some customized outlined coverage.
Take a look at the pictures beneath to see how the completely different management nodes work.
Sequence nodes execute youngsters so as till one youngster returns Failure or all youngsters returns Success.
Fallback nodes execute youngsters so as till one in every of them returns Success or all youngsters return Failure. These nodes are key in designing restoration behaviors in your autonomous brokers.
Parallel nodes will execute all their youngsters in “parallel”. That is in quotes as a result of it’s not true parallelism; at every tick, every youngster node will individually tick so as. Parallel nodes return Success when not less than M youngster nodes (between 1 and N) have succeeded, and Failure when all youngster nodes have failed.
Decorator nodes modify a single youngster node with a customized coverage. A decorator has its personal algorithm for altering the standing of the “embellished node”. For instance, an “Invert” decorator will change Success to Failure, and vice-versa. Whereas decorators can add flexibility to your conduct tree arsenal, it is best to stick to plain management nodes and customary decorators as a lot as doable so others can simply perceive your design.
The easiest way to grasp all of the phrases and graphics within the earlier part is thru an instance. Suppose now we have a cell robotic that should seek for particular objects in a house atmosphere. Assume the robotic is aware of all of the search areas beforehand; in different phrases, it already has a world mannequin to function in.Our cell robotic instance. A simulated TurtleBot3 should transfer in a identified map to seek out blocks of a given coloration.
Let’s begin easy. If there is just one location (we’ll name it A), then the BT is an easy sequence of the mandatory actions: Go to the placement after which search for the thing.
Our first conduct tree. Bask within the simplicity whilst you can…
We’ve chosen to symbolize navigation as an motion node, as it might take a while for the robotic to maneuver (returning Working within the course of). However, we symbolize imaginative and prescient as a situation node, assuming the robotic can detect the thing from a single picture as soon as it arrives at its vacation spot. I admit, that is completely contrived for the aim of exhibiting one in every of every execution node.
One quite common design precept it is best to know is outlined within the e-book as express success situations. In easier phrases, it is best to nearly at all times examine earlier than you act. For instance, should you’re already at a particular location, why not examine should you’re already there earlier than beginning a navigation motion?
Express success situations use a Fallback node with a situation previous an motion. The guarded motion will solely execute if the success situation shouldn’t be met — on this instance if the robotic shouldn’t be at location A
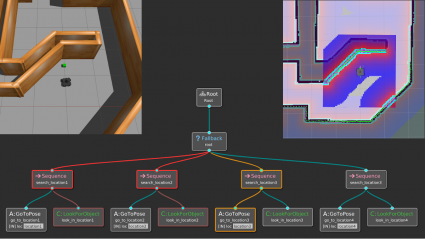
Our robotic probably operates in an atmosphere with a number of areas, and the concept is to look in all doable areas till we discover the thing of curiosity. This may be carried out by introducing a root-level Fallback node and repeating the above conduct for every location in some specified order.
We are able to additionally use Fallback nodes to outline reactive behaviors; that’s, if one conduct doesn’t work, strive the following one, and so forth.
Lastly, suppose that as an alternative of searching for a single object, we need to take into account a number of objects — let’s say apples and oranges. This use case of composing situations might be carried out with Parallel nodes as proven beneath.
If we settle for both an apple or an orange (“OR” situation), then we succeed if one node returns Success.
If we require each an apple and an orange (“AND” situation), then we succeed if each nodes return Success.
If we care concerning the order of objects, e.g., you will need to discover an apple earlier than discovering an orange, then this might be carried out with a Sequence node as an alternative.
Parallel nodes permits a number of actions and/or situations to be thought of inside a single tick.
In fact, you can even compose actions in parallel — for instance, delivering place till an individual is detected for five consecutive ticks. Whereas my instance is hopefully easy sufficient to get the fundamentals throughout, I extremely advocate wanting on the literature for extra advanced examples that actually showcase the ability of BTs.
I don’t find out about you, however wanting on the BT above leaves me considerably uneasy. It’s simply the identical conduct copied and pasted a number of instances beneath a Fallback node. What should you had 20 completely different areas, and the conduct at every location concerned extra than simply two simplified execution nodes? Issues may shortly get messy.
In most software program libraries geared for BTs you possibly can outline these execution nodes as parametric behaviors that share sources (for instance, the identical ROS motion consumer for navigation, or object detector for imaginative and prescient). Equally, you possibly can write code to construct advanced bushes robotically and compose them from a ready-made library of subtrees. So the difficulty isn’t a lot effectivity, however readability.
There’s an alternate implementation for this BT, which may lengthen to many different purposes. Right here’s the essential thought:
Introduce decorators: As an alternative of duplicating the identical subtree for every location, have a single subtree and embellish it with a coverage that repeats the conduct till profitable.
Replace the goal location at every iteration: Suppose you now have a “queue” of goal areas to go to, so at every iteration of the subtree you pop a component from that queue. If the queue finally finally ends up empty, then our BT fails.
In most BTs, we frequently want some notion of shared knowledge like the placement queue we’re discussing. That is the place the idea of a blackboard is available in: you’ll discover blackboard constructs in most BT libraries on the market, and all they are surely is a typical storage space the place particular person behaviors can learn or write knowledge.
Our instance BT may now be refactored as follows. We introduce a “GetLoc” motion that pops a location from our queue of identified areas and writes it to the blackboard as some parameter target_location. If the queue is empty, this returns Failure; in any other case it returns Success. Then, downstream nodes that take care of navigation can use this target_location parameter, which adjustments each time the subtree repeats.
The addition of a blackboard and a “Repeat” decorator can enormously simplify our tree even when the underlying conduct is similar.
You need to use blackboards for a lot of different duties. Right here’s one other extension of our instance: Suppose that after discovering an object, the robotic ought to converse with the thing it detected, if any. So, the “FoundApple” and “FoundOrange” situations may write to a located_objects parameter within the blackboard and a subsequent “Converse” motion would learn it accordingly. An identical resolution might be utilized, as an example, if the robotic wants to choose up the detected object and has completely different manipulation insurance policies relying on the kind of object.
Enjoyable truth: This part truly got here from an actual dialogue with Davide Faconti, wherein… he basically schooled me. It brings me nice pleasure to show my humiliation into an academic expertise for you all.
Let’s speak about find out how to program conduct bushes! There are fairly a number of libraries devoted to BTs, however my two highlights within the robotics area are py_trees and BehaviorTree.CPP.
py_trees is a Python library created by Daniel Stonier.
As a result of it makes use of an interpreted language like Python, the interface could be very versatile and you may mainly do what you need… which has its professionals and cons. I personally suppose this can be a sensible choice should you plan on robotically modifying conduct bushes at run time.
It’s being actively developed and with each launch you can find new options. Nonetheless, most of the new developments — not simply further decorators and coverage choices, however the visualization and logging instruments — are already full-steam-ahead with ROS 2. So should you’re nonetheless utilizing ROS 1 you can find your self lacking lots of new issues. Take a look at the PyTrees-ROS Ecosystem web page for extra particulars.
Among the terminology and design paradigms are slightly bit completely different from the Conduct Timber in Robotics e-book. For instance, as an alternative of Fallback nodes this library makes use of Selector nodes, and these behave barely otherwise.
Our navigation instance utilizing the py_trees library and rqt_py_trees for visualization.
BehaviorTree.CPP is a C++ library developed by Davide Faconti and Michele Colledanchise (sure, one of many e-book authors). It ought to subsequently be no shock that this library follows the e-book notation far more faithfully.
This library is shortly gaining traction because the conduct tree library of the ROS builders’ ecosystem, as a result of C++ is equally the language of manufacturing high quality improvement for robotics. In actual fact, the official ROS 2 navigation stack makes use of this library in its BT Navigator function.
It closely depends on an XML primarily based workflow, that means that the really helpful option to writer a BT is thru XML recordsdata. In your code, you register node sorts with user-defined courses (which may inherit from a wealthy library of present courses), and your BT is robotically synthesized!
It’s paired with an incredible software named Groot which isn’t solely a visualizer, however a graphical interface for modifying conduct bushes. The XML design precept mainly means which you can draw a BT and export it as an XML file that plugs into your code.
This all works splendidly if you realize the construction of your BT beforehand, however leaves slightly to be desired should you plan to switch your bushes at runtime. Granted, you can even obtain this utilizing the programmatic method reasonably than XML, however this workflow shouldn’t be documented/really helpful, and doesn’t but play nicely with the visualization instruments.
Our navigation instance utilizing the BehaviorTree.CPP library and Groot for visualization.
So how must you select between these two libraries? They’re each mature, comprise a wealthy set of instruments, and combine nicely with the ROS ecosystem. It in the end boils down as to whether you need to use C++ or Python in your improvement. In my instance GitHub repo I attempted them each out, so you possibly can resolve for your self!
In my time at MathWorks, I used to be immersed in designing state machines for robotic conduct utilizing Stateflow — in actual fact, I even did a YouTube livestream on this matter. Nonetheless, robotics of us usually requested me if there have been comparable instruments for modeling conduct bushes, which I had by no means heard of on the time. Quick ahead to my first day at CSAIL, my colleague on the time (Daehyung Park) confirmed me one in every of his repositories and I lastly noticed my first conduct tree. It wasn’t lengthy till I used to be working with them in my venture as a layer between planning and execution, which I describe in my 2020 recap weblog put up.
As somebody who has given lots of thought to “how is a BT completely different from a FSM?”, I needed to reaffirm that they each have their strengths and weaknesses, and the most effective factor you are able to do is study when an issue is best fitted to one or the opposite (or each).
The Conduct Timber in Robotics and AI e-book expands on these ideas in far more rigor, however right here is my try and summarize the important thing concepts:
In idea, it’s doable to precise something as a BT, FSM, one of many different abstractions, or as plain code. Nonetheless, every mannequin has its personal benefits and drawbacks of their intent to assist design at bigger scale.
Particular to BTs vs. FSMs, there’s a tradeoff between modularity and reactivity. Usually, BTs are simpler to compose and modify whereas FSMs have their energy in designing reactive behaviors.
Let’s use one other robotics instance to go deeper into these comparisons. Suppose now we have a choosing job the place a robotic should transfer to an object, seize it by closing its gripper, after which transfer again to its house place. A side-by-side BT and FSM comparability might be discovered beneath. For a easy design like this, each implementations are comparatively clear and straightforward to comply with.
Conduct tree (left) and finite-state machine (proper) for our robotic choosing instance.
Now, what occurs if we need to modify this conduct? Say we first need to examine whether or not the pre-grasp place is legitimate, and proper if crucial earlier than closing the gripper. With a BT, we will instantly insert a subtree alongside our desired sequence of actions, whereas with a FSM we should rewire a number of transitions. That is what we imply once we declare BTs are nice for modularity.
Modifications to our BT (left) and FSM (proper) if we need to add a pre-grasp correction conduct.
However, there may be the difficulty of reactivity. Suppose our robotic is operating on a finite energy supply, so if the battery is low it should return to the charging station earlier than returning to its job. You possibly can implement one thing like this with BTs, however a totally reactive conduct (that’s, the battery state causes the robotic to go cost irrespective of the place it’s) is simpler to implement with a FSM… even when it appears a bit messy.
On the word of “messy”, conduct tree zealots are likely to make the argument of “spaghetti state machines” as the explanation why it is best to by no means use FSMs. I imagine that’s not a good comparability. The notion of a hierarchical finite-state machine (HFSM) has been round for a very long time and helps keep away from this problem should you comply with good design practices, as you possibly can see beneath. Nonetheless, it’s true that managing transitions in a HFSM remains to be harder than including or eradicating subtrees in a BT.
There have been particular constructs outlined to make BTs extra reactive for precisely these purposes. For instance, there may be the notion of a “Reactive Sequence” that may nonetheless tick earlier youngsters in a sequence even after they’ve returned Success. In our instance, this could permit us to terminate a subtree with Failure if the battery ranges are low at any level throughout that motion sequence, which can be what we would like.
Including a battery examine and charging motion to a BT is straightforward, however word that this examine shouldn’t be reactive — it solely happens firstly of the sequence. Implementing extra reactivity would complicate the design of the BT, however is doable with constructs like Reactive Sequences.
FSMs can permit this reactivity by permitting the definition of transitions between any two states.
Hierarchical FSMs can clear up the diagram. On this case, we outline a superstate named “Nominal”, thus defining two clear working modes between regular operation and charging.
Due to this modularity / reactivity tradeoff, I prefer to suppose that FSMs are good at managing higher-level working modes (corresponding to regular operation vs. charging), and BTs are good at constructing advanced sequences of behaviors which can be wonderful at dealing with recoveries from failure. So, if this design have been as much as me, it is likely to be a hybrid that appears one thing like this:
Better of each worlds: Excessive-level mode switches are dealt with by a FSM and mode-specific behaviors are managed with BTs.
Thank for studying by this introductory put up, and I sit up for your feedback, questions, and recommendations. If you wish to strive the code examples, take a look at my instance GitHub repository.
To study extra about conduct bushes, listed below are some good sources that I’ve relied on over the previous 12 months and a bit.
See you subsequent time!
Sebastian Castro
is a software program engineer within the Sturdy Robotics Group (RRG) on the MIT Laptop Science and Synthetic Intelligence Laboratory (CSAIL).
Sebastian Castro
is a software program engineer within the Sturdy Robotics Group (RRG) on the MIT Laptop Science and Synthetic Intelligence Laboratory (CSAIL).
[ad_2]