
{kind=link}
[ad_1]
Take heed to this text
At Cogniteam, we have been early adopters of ROS in 2009.
Truly, we have been early adopters of Participant/Stage, the ROS predecessor. Again then, distributors have been hesitant to affix within the Robotic Working System buzz. Generic protocols, software program packages, and visualization instruments have been one thing that every firm would have developed internally, many times. Linux was thought of good for the academy and hackers, and Home windows was competing to get a foot into the robotic market with Home windows Robotic Studio.
2D stage simulator (2007)
Again then, making a driver work would often imply compiling your individual Linux Kernel, studying by some obscure boards by the sunshine of a candle, or as my lab professor would say “Right here be dragons.” By the point you would see actual picture knowledge streaming by your C++ code, your laptop computer graphic show driver would often cease working because of incompatible dependencies and ubuntu would crash on boot.
By now, greater than a decade has handed. ROS has come into the image, making knowledge visualization, SLAM algorithms, and navigating robots one thing that anybody with some free time and a step-by-step tutorial can observe by, take a look at, and customise. Robotic Sensor / Platform distributors themselves at the moment are accepting ROS and releasing git repositories with ready-made ROS nodes — nodes that they themselves used to check and develop the {hardware}.
A shift in robotics improvement
This gives the look that the fundamental rising pains of robotic software program improvement at the moment are lengthy gone. Shopping for off-the-shelf elements, constructing your individual robotic has by no means been simpler, and that’s earlier than we even discuss simulation instruments and the cloud.
Here’s a bizarre reality, a lot of the robots created at the moment are nonetheless closed containers; the OS can’t be up to date, and they don’t seem to be ROS-based. iRobot, for instance, mentioned their intention in 2019 to maneuver away from a proprietary working system to a ROS primarily based one, (supply) and is at present utilizing ROS just for testing its infrastructure in AWS Robomaker (supply). This is only one instance. If you happen to check out the robots round you, a lot of the points they face won’t ever be solvable and their conduct won’t change tremendously. Right this moment’s ROS-based robots might be changed by an entire new OS with a full-blown new ROS launch in a brand new robotic. However what occurred to the previous robotic and the previous code? Bear in mind when telephones behaved that approach? Earlier than FOTA (Firmware Over The Air). Earlier than App shops. Earlier than Android.
Right here is one other enjoyable reality: each new robotic out within the wild has a weblog. There’s a YouTuber on the market importing a assessment for it, and he’s evaluating it to all the opposite vendor’s fashions and algorithms. Why are the businesses not doing that to begin with? Entire setups are onerous to interrupt down and reassemble. Program flows will not be transferable. We all know, in 2012 we launched some primary conduct tree decision-making code to ROS. It took till ROS2 to see a conduct engine first used as a ROS customary part. Have you ever ever tried to reconfigure move-base between robots, arrange TF’s, and reconfigure thresholds for damaging and optimistic obstacles when the sensor kind or place modified? Updating its simulative mannequin? Ensuring its dependencies are met between the varied ROS variations offered by the seller?
Seems like we’re again to sq. one, doesn’t it?
Breaking the cycle
Nimbus began with these examples in thoughts, as a approach to break the cycle by offering instruments to develop, bundle, deploy and handle cloud-connected robots. Nimbus makes use of containerized functions as software program elements. In Nimbus, these software program elements might be organized, related, and reassembled by code, console interface, or from the online utilizing GUI, making anybody (even with out ROS particular know-how) in a position to perceive and see the varied constructing blocks that compose the robotic execution. The aim of deconstructing the mission to containerized blocks can be to untie the problematic coupling of OS and ROS variations by offering isolation and enabling utilizing varied ROS distributions on the identical robotic, together with ROS1 and ROS2 elements collectively.
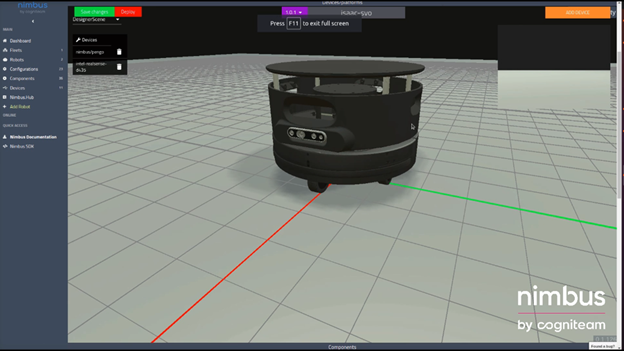
Nimbus 3D configuration editor
Elements can now be simply changed making testing of different algorithms simpler and robotic entry might be shared between operators and builders to permit distant entry to the robotic at any time. This doesn’t require putting in something on the robotic itself as all of the installations are being managed by an agent working as a service on the robotic. A number of customers can see dwell knowledge or entry the robotic configuration and alter it.
Utilizing the Nimbus spine is like having an entire DevOp staff inside your staff.
The robotic configuration and instruments for viewing and modifying it are additionally essential elements of Nimbus. By constructing the robotic mannequin in Nimbus (configuring the robotic sensors and drivers), Nimbus can preserve monitor of driver variations, monitor the gadgets, generate TF’s (coordination transformation companies to elements), and auto-generate a simulation to your code, thus enabling you to alter sensor location/kind and simulatively take a look at different eventualities – all with none coding. Nimbus additionally gives introspection, visualization and coming quickly might be analytic instruments to ease the event of robots and produce on the robotic revolution.
Log in, begin creating proper now, and keep tuned for what’s to return.
We’ve simply began. Begin your free trial www.cognimbus.com
Sponsored content material by Cogniteam
[ad_2]